



12V dc nopea puhallin
Puhaltimen ominaisuudet
Tuotemerkki: Wonsmart
Korkea paine DC-harjattomalla moottorilla
Puhaltimen tyyppi: Keskipakotuuletin
Jännite: 12 VDC
Laakeri: NMB-kuulalaakeri
Sovellettavat toimialat: Tuotantolaitos
Sähkövirran tyyppi: DC
Terän materiaali: muovi
Asennus: Kattotuuletin
Alkuperäpaikka: Zhejiang, Kiina
Sertifiointi: ce, RoHS
Takuu: 1 vuosi
Tarjottu huoltopalvelu: Online-tuki
Elinikä (MTTF): >20 000 tuntia (alle 25 astetta C)
Paino: 80 grammaa
Kotelon materiaali: PC
Moottorityyppi: Kolmivaiheinen DC-harjaton moottori
Ohjain: ulkoinen


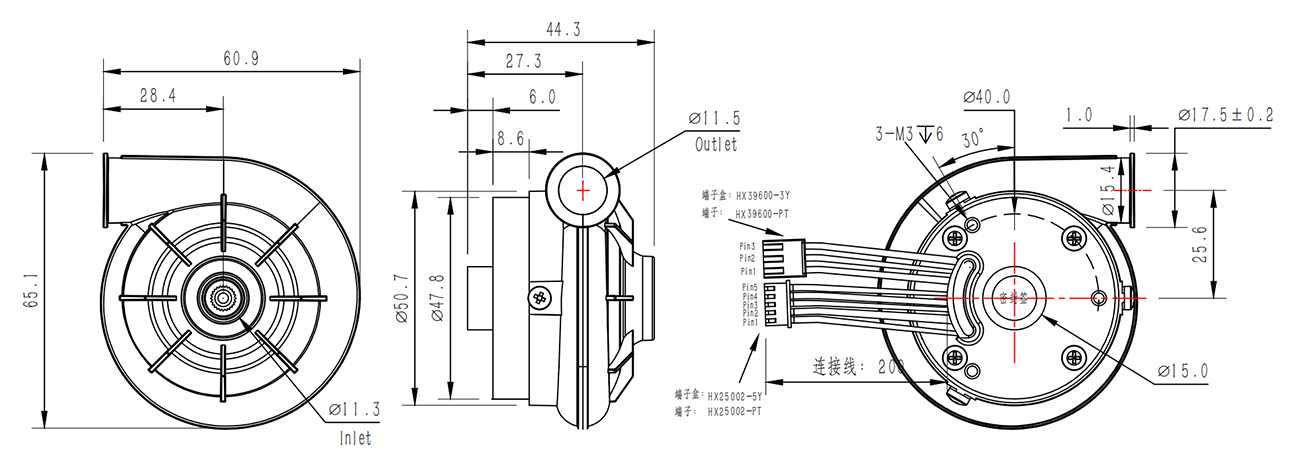
Piirustus
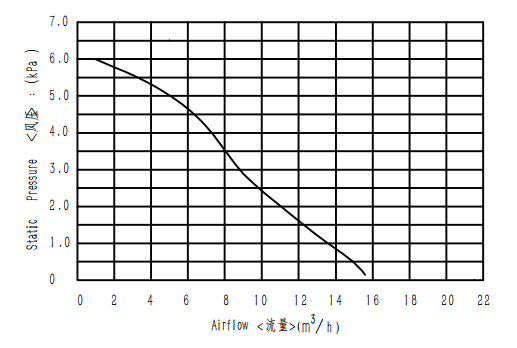
Puhaltimen suorituskyky
12 V tasavirtapuhallin voi saavuttaa maksimissaan 16 m3/h ilmavirran 0 kpa paineella ja maksimi 6 kpa staattisella paineella. Kun tämä puhallin toimii 3 kPa:n resistanssilla, jos asetamme 100 % PWM:n, sillä on suurin ulostuloilmateho. asetettu 100 % PWM. Muu kuormituspisteen suorituskyky, katso alla oleva PQ-käyrä:
Sovellukset
Tätä puhallinta voidaan käyttää laajalti ilmatyynykoneeseen, CPAP-koneeseen, SMD-juotoskoneeseen.
DC-harjattoman puhaltimen etu
(1).12V tasavirtapuhallin on harjattomilla moottoreilla ja sisällä NMB-kuulalaakerilla, mikä osoittaa erittäin pitkän käyttöiän; Tämän puhaltimen MTTF voi saavuttaa yli 20 000 tuntia 20 asteen ympäristölämpötilassa.
(2). Tämä puhallin ei tarvitse huoltoa
(3). Tässä harjattomalla moottoriohjaimella ohjatulla puhaltimella on monia erilaisia ohjaustoimintoja, kuten nopeuden säätö, nopeuspulssilähtö, nopea kiihtyvyys, jarru jne. Sitä voidaan ohjata älykkäällä koneella ja laitteilla helposti.
(4). Puhaltimessa on harjattomalla moottoriohjaimella ylivirta-, ali-/ylijännite- ja jumisuojat.
Kuinka käyttää puhallinta oikein

FAQ
K: Myytkö myös ohjainkorttia tälle tuulettimelle?
V: Kyllä, voimme toimittaa mukautetun ohjainkortin tälle tuulettimelle.
Lääketieteellisissä ventilaattoreissa järjestelmän paine (virtausvastus) vaihtelee huomattavasti ventilaation aikana. Tämän seurauksena virtausnopeutta on vaikea hallita, jos nykyisen virtausnopeuden ja odotettavissa olevien järjestelmän paineiden suuruuksia ei tiedetä etukäteen riittävän hyvällä tarkkuus. Nykyinen järjestelmäpaine voidaan mitata ja käyttää takaisinkytkentäohjaussilmukassa puhaltimen ohjaamiseen sen elektronisen ohjauspiirin kautta. Järjestelmän paine kuitenkin muuttuu todellisen virtausnopeuden mukaan, ja myös puhaltimen työpiste muuttuu järjestelmän paineen vaihtelun mukaan. Tämä aiheuttaa epävakautta lääketieteellisessä hengityslaitteessa tarkkuuden rajoitusten seurauksena. paineanturin dynaaminen käyttäytyminen jne., mikä puolestaan johtaa epävakaaseen ja epätarkkaan virtausnopeuden säätöön.
Alalla tunnetaan erilaisia järjestelmiä, jotka ohjaavat virtausta. Perinteisesti kaasun virtausnopeutta ohjataan kaasuvirtausventtiilin avulla. Yhdessä myötäkytkentäisen virtauksen ohjauksen vahvistuskomponentin ja/tai takaisinkytkentävirheen korjauksen (esim. suhteellinen, integraalinen ja derivatiivinen virhetakaisinkytkentäohjaus) yhdistelmän kanssa tämä saa aikaan vaaditun vasteen.
Toinen tunnettu menetelmä kaasun virtausnopeuden säätämiseksi on puhaltimen ominaisuuksien eksplisiittinen hyödyntäminen. Puhaltimen nopeutta voidaan ohjata säädettävästi järjestelmän paineen ja virtausnopeuden välisen ennalta määrätyn suhteen perusteella. Puhallin on suunniteltu reagoimaan nopeasti sisään- tai uloshengityksen muutokseen minimoimalla sen hitaus. Tässä tapauksessa takaisinkytkentäsäädintä voidaan käyttää myös kaasuvirran ohjaamiseen. Järjestelmän paineen vaihtelut voivat kuitenkin muuttaa virtausnopeutta, jopa vakionopeudella. Tätä ongelmaa ei voida täysin ratkaista palauteohjauksella. Jatkuvasti muuttuva järjestelmän paine johtaa yleensä epävakaan järjestelmään tai värähtelyihin tavoitevirtauksen ympärillä.





